
Presse universelle MecaMotion par 
Instruction contrôle "Mesure d'un signal"
Cette instruction permet de mesurer la valeur d'un signal "X", au moment ou un signal de trigger "Y" atteint un certain seuil.
Pour qu'une mesure du signal "X" soit effectuée, le signal de trigger doit être, soit plus grand, soit plus petit (en fonction du type de comparaison), que la valeur du paramètre de seuil.
Lorsque le signal "X" est mesuré, ce dernier est multiplié par un facteur "A" et un offset "B" lui est ajouté. Ce facteur et cet offset sont des paramètres de la fonction (par défaut, le facteur est réglé sur 1 et l'offset est réglé sur 0). Ces paramètres peuvent provenir d'une variable utilisateur ou être donnés comme constantes.
Le résultat stocké dans la variable de retour, sera égal à:
Valeur mesurée résultante = Valeur mesurée au Seuil * Facteur A + Offset B
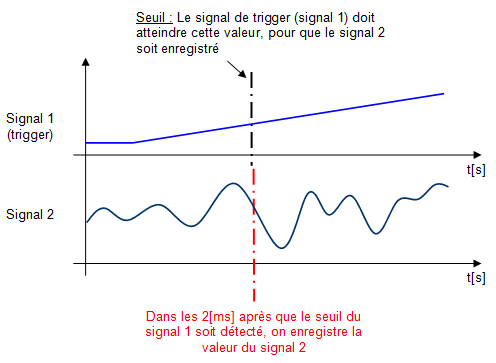
Figure 1: Graphique expliquant le fonctionnement du contrôle "Mesure Signal"
Les signaux qui peuvent être définis comme trigger sont le suivants:
•Position de l'axe
•Détecteur de force
•Signal du palpeur
Il y a deux types de comparaison du trigger par rapport au seuil:
•Comparaison ">": Si le signal de trigger est plus grand ou égal au seuil => Enregistrement de la valeur du signal mesuré.
•Comparaison "<": Si le signal de trigger est plus petite ou égale au seuil => Enregistrement de la valeur du signal mesuré.
Au moment ou le signal de trigger passe le seuil donné en paramètre, il est possible d'enregistrer la valeur d'un des trois signaux ci-dessous:
•Position de l'axe
•Détecteur de force
•Signal du palpeur
Ci-dessous, la liste des paramètres d'entrées et sorties de l'instruction :
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Signal de trigger |
Entrée |
Enum [Source signal] |
Position de l'axe |
Signal de trigger de la comparaison, palpeur, position de l'axe ou détecteur de force |
Comparaison |
Entrée |
Enum [Comparaison] |
> |
Type de comparaison ">" ou "<" |
Seuil |
Entrée |
LREAL |
0 |
Seuil que le signal de trigger doit atteindre pour effectuer l'enregistrement du signal mesuré |
Signal mesuré |
Entrée |
Enum [Source signal] |
Détecteur de force |
Signal mesuré, palpeur, position de l'axe ou détecteur de force |
Facteur |
Entrée |
LREAL |
1 |
Facteur multiplié au résultat |
Offset |
Entrée |
LREAL |
0 |
Offset ajouté au résultat |
Résultat |
Sortie |
LREAL |
-- |
Valeur mesurée lorsque la comparaison devient vraie * facteur + offset |
Tableau 1: Liste des paramètres de l'instruction
Astuce: Si la variable "résultat" doit contenir la valeur qui a réellement été mesurée, il suffit de mettre les paramètres d'offset et de multiplication suivant: Facteur A = 1 Offset B = 0 |
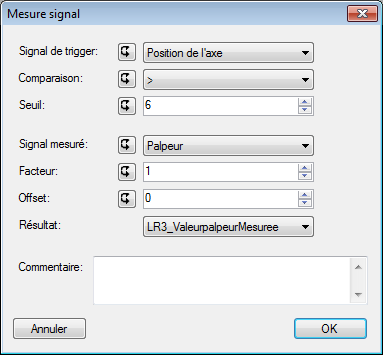
Figure 2: Exemple de programmation du contrôle mesure signal
Exemple d'utilisation: Nous souhaitons relever la position de l'axe à laquelle la presse commence à fournir un effort sur la pièce. 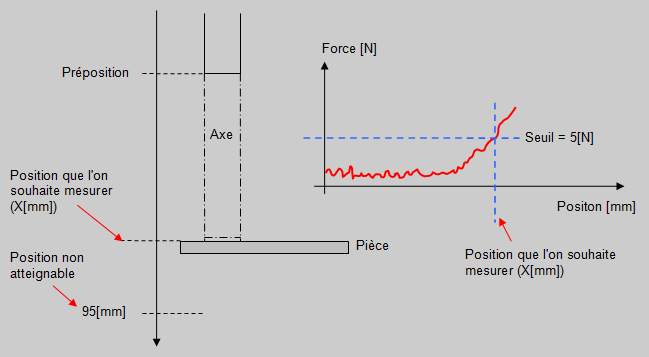 Figure 3: Explication schématique de l'opération Dans le programme ci dessous, nous réalisons un mouvement vers la préposition à vitesse rapide, puis un mouvement à vitesse lente pour arriver en contact avec la pièce (Force > 5[N]), à ce moment là, nous enregistrons la position de l'axe et nous arrêtons le mouvement. 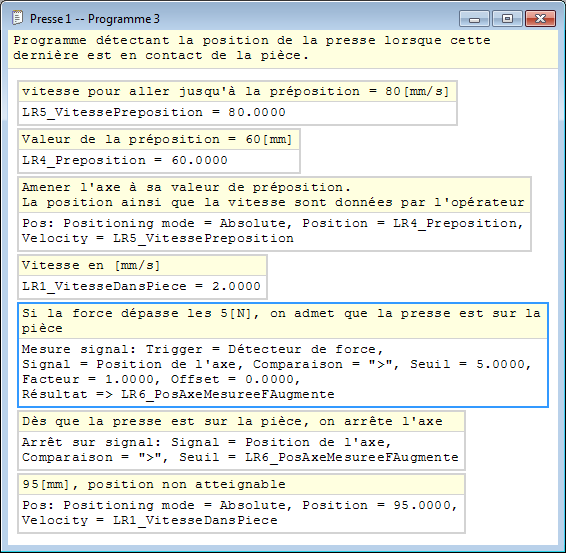 Figure 4: Programme pièce pour enregistrer la position de l'axe lorsque la force > 5[N] |
