
Presse universelle MecaMotion par 
Instruction contrôle "Arrêt sur signal"
Cette instruction permet d'arrêter l'axe de la presse dès qu'un signal a dépassé un certain seuil (plus grand ou plus petit).
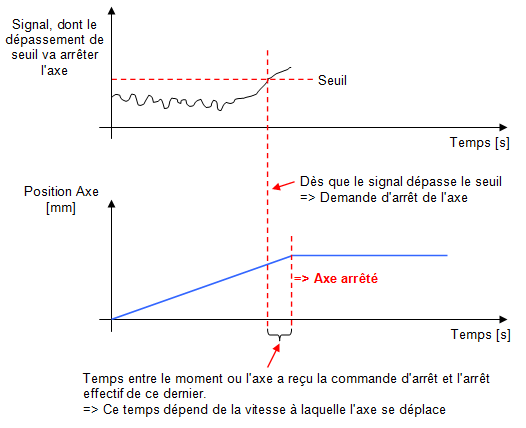
Figure 1: Fonctionnement général du contrôle arrêt sur signal
Les signaux qui peuvent être contrôlés sont les suivants:
•Détecteur de force
•Signal du Palpeur
•Position de l'axe
Il y a deux types de comparaison du trigger par rapport au seuil:
•Plus grand que '>': Si le signal passe au dessus du seuil => Arrêt de l'axe
•Plus petit que '<': Si le signal passe en dessous du seuil => Arrêt de l'axe
La valeur du seuil peut provenir d'une variable utilisateur ou être donnée comme constante.
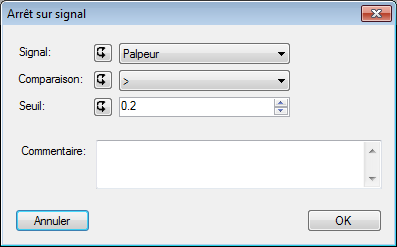
Figure 2: Exemple de programmation d'un contrôle arrêt sur signal. Arrêt axe si position palpeur > 0.2[mm]
Ci-dessous, la liste des paramètres d'entrées et sorties de l'instruction :
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Signal |
Entrée |
Enum [Source signal] |
Position de l'axe |
Signal de trigger de la comparaison, palpeur, position de l'axe ou détecteur de force |
Comparaison |
Entrée |
Enum [Comparaison] |
> |
Type de comparaison ">" ou "<" |
Seuil |
Entrée |
LREAL |
0 |
Seuil que le signal de trigger doit atteindre pour générer un arrêt de l'axe |
Tableau 1: Liste des paramètres de l'instruction
Exemple d'utilisation : Nous souhaitons détecter un problème palpeur, si la position du palpeur dépasse le seuil de 0.2[mm] avant que l'axe ne soit en préposition, nous créons une erreur. Si la valeur du palpeur n'a pas dépassé 0.2[mm] durant la descente en préposition, nous effectuons un déplacement à la position absolue 25.4[mm] sinon l'instruction de saut nous amène à la fin du programme. 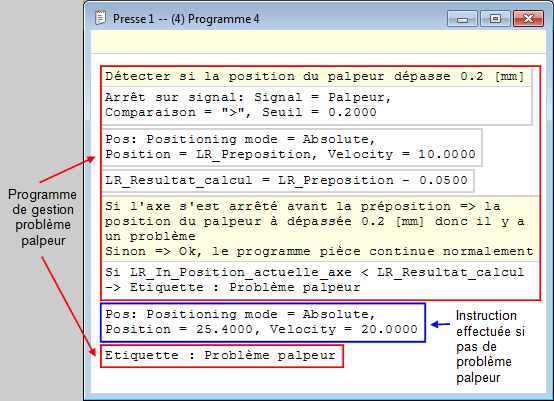 Figure 3: Utilisation fonction arrêt sur signal pour détecter un problème palpeur |
