
Presse universelle MecaMotion par 
Vue globale du système "Presse universelle".
La presse universelle est construite autour d'une architecture SIMOTION (Siemens). Cette architecture est composée du matériel suivant :
•Unité de contrôle D410-2 spécifique à la commande d'axe
•Partie Puissance PM240-2
Dans le cas ou le moteur n'est pas de marque Siemens et que le codeur retourne des signaux ENDAT, il faut ajouter le module ci-dessous :
•Retour du codeur: Convertisseur codeur SME25 (ENDAT vers Drive-CliQ)
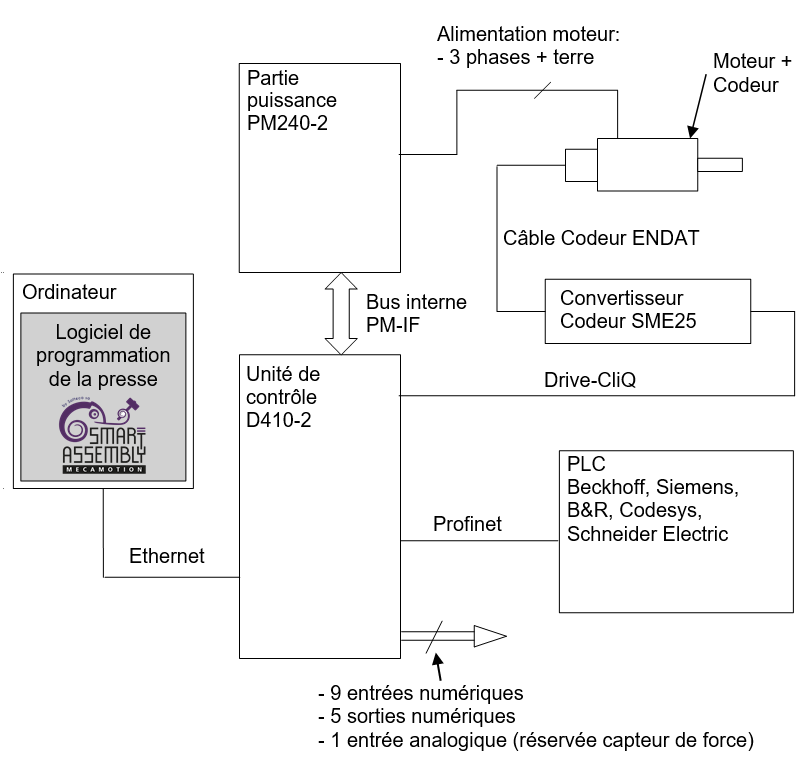
Figure 1: Schéma bloc de la presse dans le cas ou le moteur n'est pas de marque Siemens
Programmation de la presse
La programmation de la presse se fait par le biais du logiciel MecaMotion, via une liaison Ethernet.
À l'aide du logiciel MecaMotion, il est possible d'effectuer les opérations suivantes:
•Programmer différents cycles (jusqu'à 254 programmes pièce).
•Modifier les paramètres de la presse.
•Réceptionner et visualiser les courbes "Force = f(Position)".
•Définir l'association des variables utilisateurs aux entrées/sorties (physiques ou Profinet/Profibus).
•Comparer les projets en ligne / hors ligne.
•Contrôler l'allure de la courbe "Force = f(Position)" par le biais d'une enveloppe.
•Visualiser l'avancement du programme pièce en cours ainsi que les valeurs des variables utilisateurs.
•Créer des ordres de fabrication et sauver les résultats dans une base de données.
•Commander la presse manuellement et exécuter les programmes pièces (mode standalone)
Pilotage de la presse par un automate
Vous pouvez piloter la presse avec MecaMotion (mode standalone) ou avec un automate programmable et dans ce cas, les différentes commandes qui permettent de piloter la presse doivent être envoyées via une liaison Profinet ou Profibus. Exemple :
•Exécuter le programme pièce.
•Choisir le mode de pilotage de la presse (manuel ou automatique).
•JOG monter et descendre (marche à vue).
•Visualiser les erreurs présentes.
•Visualiser les données technologiques (force, position).
•...
