
Presse universelle MecaMotion par 
Instruction "Régulation de force"
Cette instruction permet d'appliquer avec la presse, une force constante pendant un temps défini.
Cette force est mesurée avec le capteur de force externe.
Utilisation de l'instruction
Cette instruction doit être utilisée lorsque la presse est en précontrainte mécanique.
Elle peut donc s'effectuer après un arrêt sur force ou après un positionnement qui amène la presse en précontrainte.
Paramètres standards de l'instruction :
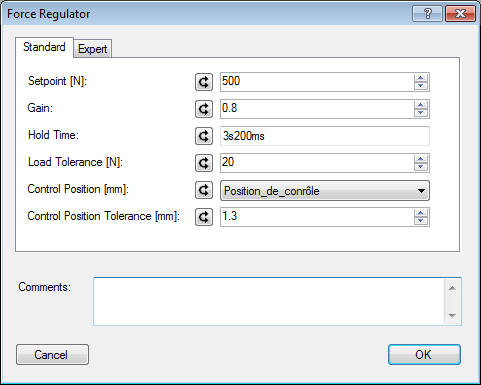
Figure 1: Paramètres standards de l'instruction régulation force
Les paramètres standards de cette instruction sont les suivants :
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Consigne [N] |
Entrée |
REAL |
1[N] |
Consigne de force à appliquer |
Gain |
Entrée |
REAL |
1 |
Gain proportionnel de la fonction de régulation |
Temps maintien [ms] |
|
TIME |
100[ms] |
Temps de maintien de la force d'appui |
Tolérance effort [N] |
Entrée |
REAL |
0.5[N] |
Tolérance +/- de la consigne de force dans laquelle doit se trouver l'axe à la fin de la régulation pour qu'il n'y ait pas d'erreur |
Position de contrôle [mm] |
Entrée |
LREAL |
0[mm] |
Position que l'axe doit avoir à la fin de la régulation. Si position = 0 pas de contrôle |
Tolérance position contrôle [mm] |
Entrée |
LREAL |
1[mm] |
Tolérance +/- de la position dans laquelle doit se trouver l'axe à la fin de la régulation pour qu'il n'y ait pas d'erreur |
Tableau 1: Liste des paramètres standards de l'instruction
Si besoin, il est possible d'affiner les réglages de la régulation à l'aide des paramètres experts.
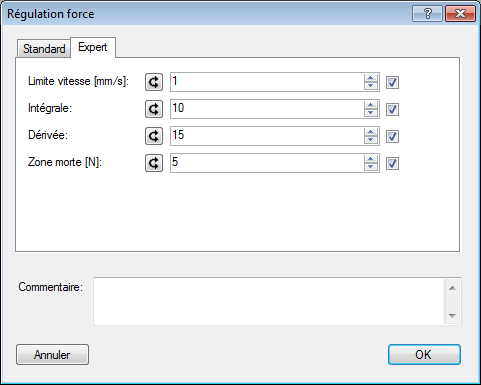
Figure 2: Paramètres experts de l'instruction régulation force
Les paramètres experts disponibles pour cette instruction sont les suivants:
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Limite de vitesse [mm/s] |
Entrée |
REAL |
1[mm/s] |
Vitesse maximum que peut atteindre l'axe lorsqu'il effectue la régulation |
Intégrale |
Entrée |
REAL |
1[ms] |
Intégrale de la fonction de régulation |
Dérivée |
Entrée |
REAL |
1[ms] |
Dérivée de la fonction de régulation |
Zone morte [N] |
Entrée |
REAL |
1[N] |
Zone +/- de la consigne de force dans laquelle la régulation de l'axe est arrêtée |
Tableau 2: Liste des paramètres experts de l'instruction
Résultats de l'instruction
Lorsque l'instruction est terminée, la position et la force mesurées à la fin du temps de maintien sont retournées. (En cours de réalisation)
Erreurs de l'instruction
Les erreurs possibles pour l'instruction de régulation de force sont les suivantes : (Erreurs retournées par Profinet)
•Erreur N°24 : Position hors tolérance
•Erreur N°25 : Force hors tolérance
Exemple d'utilisation : Dans cette exemple, nous effectuons un positionnement avec un arrêt sur force pour amener la presse en précontrainte, puis nous appliquons une force de 500N pendant 3.2s. 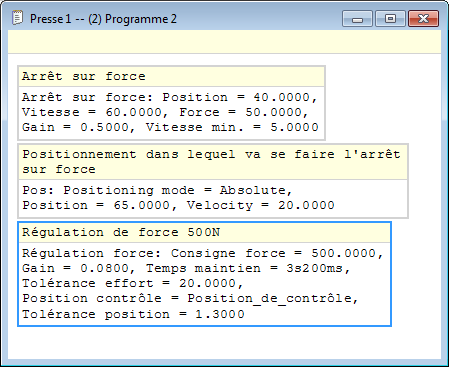 Figure 3: Utilisation de l'instruction de régulation de force |
